Simulate Dynamic Matrix Control with Simupy
Simulate Dynamic Matrix Control with Simupy
I wrote some code about the symulation of Dynamic Matirx Control with simupy.
SimuPy is a framework for simulating interconnected dynamical system models and provides an open source, python-based tool that can be used in model- and system- based design and simulation workflows.
DMC or Dynamic Matrix Control is a typical Model Predictive Control (MPC) method using the prediction of future steps to control the system. It usually applies in process control for its requirement for matrix operation in controller.
Design Controller
Use the steps of Finite Step Response(FSR) from the given process , we can prodict the response in future steps, and apply the first step's result to the system.
Usually, and .
def ModelPredictiveControl(delta_t,N,P,M):
T=np.arange(N)*delta_t
(T,S)=control.step_response(Gp,T)
Sf=np.zeros((P,M))
for i in range(P):
for j in range(M):
if i+j>=min(M,P):
Sf[i,j]=S[i+j-min(M,P)+1]
Q=np.diagflat(np.ones((1,P)))
R=np.zeros((M,M))
a=(np.dot(np.dot(Sf.T,Q),Sf)+R)
K=np.dot(np.linalg.inv(a),np.dot(Sf.T,Q))
K1=K[0,:]
h=0.5*np.ones(N)
h[0]=1
def MPC(t,input):
global lastU,y0,lastT
[y,r]=input
yr=np.ones((P))*r
if t==0:
lastT=0
lastU=0
y0=np.zeros((N))
elif t>=lastT and t<lastT+delta_t:
lastT=lastT+delta_t
d_hat=y-y0[0]
y0=y0+h*d_hat
y0[0:-1]=y0[1:]
e=yr-y0[0:P]
du=np.dot(K1,e.T)
lastU=lastU+du
y0=y0+S*du
return np.array(lastU)
return MPC
use the function returned as a callable in simupy. then we can connect this Block with others.
controller=simupy.systems.SystemFromCallable(
ModelPredictiveControl(delta_t,N,P,M),
2,1)
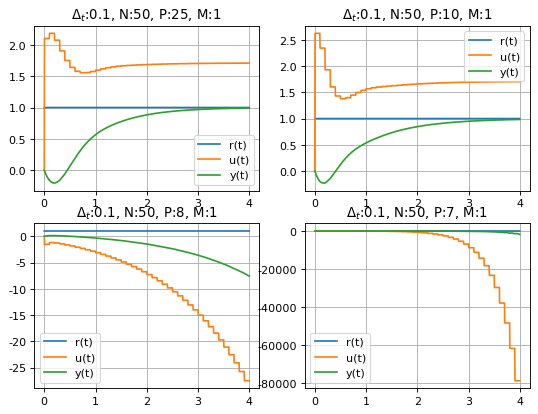
Simulate the result
By running the Code, we can know that in this case, the more steps we predict, the better performance we will get.
References
- Siang Lim.February 2020.Implementing Dynamic Matrix Control in Python
- Matlab.Dynamic Matrix Control Tutorial